projesi")
Donanım Rehberi: Arduino ve LM393 Sensör ile DC Motor RPM Ölçüm Sistemi
Robotik projelerinde ve endüstriyel otomasyon sistemlerinde motor performansını takip etmek için anlık hız verisi kritik öneme sahiptir. Ecem Bilgisayar güvencesiyle hazırlanan bu projede; LM393 hız sensörü, enkoder disk ve Arduino kullanılarak bir DC motorun dakikadaki devir sayısının (RPM) nasıl hesaplandığını ve LCD ekrana yansıtıldığını teknik detaylarıyla inceliyoruz.
Hız Ölçümünün Teknik Mantığı ve Enkoder Sistemi
Projenin merkezinde, kızılötesi (IR) ışınları kullanan bir optik algılama sistemi yer almaktadır. Sistemin efektif çalışma süreci, motor miline bağlı bir diskin sensör arasından geçerek ışık sinyalini kesmesi prensibine dayanır.
- Optik Enkoder Disk: Motor miline sabitlenen delikli disk, IR sensörün verici ve alıcı LED'leri arasındaki yola konumlandırılır.
- Sinyal Kesme Algoritması: Motor döndükçe diskin üzerindeki her delik, sensörün kızılötesi ışınını keserek bir dijital darbe (pulse) oluşturur.
- Kesme (Interrupt) Kullanımı: Arduino, bu yüksek hızlı sinyalleri "attachInterrupt" fonksiyonu ile sayarak işlemci yükünü minimize eder ve hassas bir veri toplama süreci sağlar.
Projede Kullanılan Donanım Bileşenleri
Hız ölçüm sisteminin kararlılığı, kullanılan sensörlerin ve sürücülerin kalitesine bağlıdır. Ecem Bilgisayar hazır kit içeriğinde birbiriyle tam uyumlu profesyonel bileşenler sunulmaktadır.
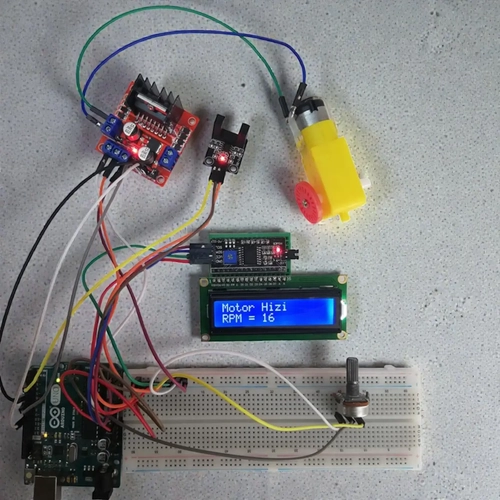
- Arduino Uno R3: Sensörden gelen frekans verilerini saniyeler içinde işleyen ve RPM değerine dönüştüren ana kontrol ünitesi.
- LM393 Hız Sensörü: Slot tipi optik okuyucu olan bu modül, 5V ile çalışarak yüksek çözünürlüklü dijital çıkış sağlar.
- 16x2 I2C LCD Ekran: Kablo kalabalığını azaltan I2C arayüzü sayesinde hız verilerini anlık ve net olarak görüntüleyen ekran birimi.
- L298N Motor Sürücü: DC motorun hızını PWM sinyalleri ile ayarlamanızı ve dönme yönünü kontrol etmenizi sağlayan güç ünitesi.
RPM Hesaplama Formülü ve Yazılım Süreci
Dakikadaki devir sayısını bulmak için sensörden gelen darbe sayısı zaman birimiyle ilişkilendirilir. Arduino yazılım katmanında aşağıdaki matematiksel model işletilir:
- Adım 1: Belirli bir süre (örneğin 1 saniye) boyunca sensörden gelen toplam darbe sayısı sayılır.
- Adım 2: Toplam darbe sayısı, enkoder diskin üzerindeki delik sayısına bölünerek saniyedeki tam tur sayısı bulunur.
- Adım 3: Saniyedeki tur sayısı 60 ile çarpılarak RPM (Revolutions Per Minute) değeri elde edilir ve LCD ekrana yazdırılır.
Sık Sorulan Sorular
RPM ölçümünde neden enkoder disk kullanılır?
Enkoder disk, motorun mekanik dönüşünü elektriksel sinyallere çevirmek için en güvenilir yöntemdir. Diskteki delik sayısı arttıkça ölçüm hassasiyeti de artar.
Ölçülen değerlerde neden sapma olabilir?
Sensör ile enkoder disk arasındaki mesafenin doğru ayarlanmaması veya ortamdaki aşırı ışık kirliliği IR sensörün hatalı veri üretmesine neden olabilir.
Sistem yüksek devirli motorlarda çalışır mı?
Evet, ancak yüksek hızlarda Arduino'nun "Interrupt" (kesme) pinlerini kullanmak zorunludur. Standart okuma yöntemleri yüksek frekanslı sinyalleri kaçırabilir.
I2C LCD ekranın kontrastı nasıl ayarlanır?
Ekranın arkasında bulunan mavi trimpotu bir tornavida yardımıyla çevirerek karakterlerin netliğini projenize uygun şekilde belirleyebilirsiniz.
Hız Ölçüm Proje Kitini İnceleyin
Tüm bileşenleri bir arada sunan, breadboard üzerinde kurulu ve kodları yüklenmiş Arduino DC Motor Hız Ölçüm kiti için: Arduino Hız Ölçüm Kategorisi